از این مد برای بررسی اتصالات صحیح سروو درایو به سروو موتور، سالم بودن درایو و همچنین حرکت با دقت از نقطهای به نقطه دیگر با سرعت کم و جلوگیری از نوسان سروو موتور حول نقطه مورد نظر استفاده میگردد.برای راه اندازی سرووموتور در حالت JOGدستی مراحل زیر باید انجام گردد:
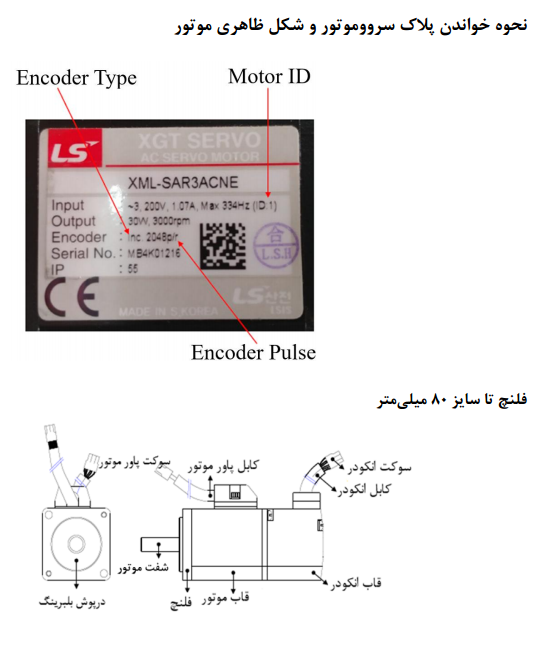
معرفی IDموتور: P0-00=1
معرفی نوع و تعداد پالس یا تعداد بیت انکدر: P0-01=0و P0-02=2048
وظیفه پایه های ورودی را تنظیم کنید P2-02=00A9 , P2-01=0X8765, P2-00=0X4321
منطق پایه های ورودی را تعریف کنید. P2-08= 11111 , P2-09= 10001
در صورت عدم اتصال المان به پایه های ورودی باید مقدار پارامتر P2-09=11111باشد. پارامتر CN-00
را انتخاب کرده و با فشردن و نگه داشتن جهت بالا یا پایین، موتور در حالت راستگرد یا چپگرد قرار میگیرد با تنظیم پارامتر -P3
12سرعت چرخش سرووموتور در مد JOG را تنظیم میکنیم.
برای راه اندازی سرووموتور در حالت JOG اتوماتیک مراحل زیر باید انجام گردد:
1-معرفی IDموتور: P0-00=1
2-معرفی نوع و تعداد پالس یا تعداد بیت انکدر: P0-01=0و P0-02=2048
3-وظیفه پایه های ورودی را تنظیم کنیدP2-02=00A9 , P2-01=0X8765, P2-00=0X4321
4-منطق پایه های ورودی را تعریف کنید. P2-08= 11111 , P2-09= 10001در صورت عدم اتصال المان به پایه های ورودی که باید مقدار پارامتر P2-09=11111باشد.
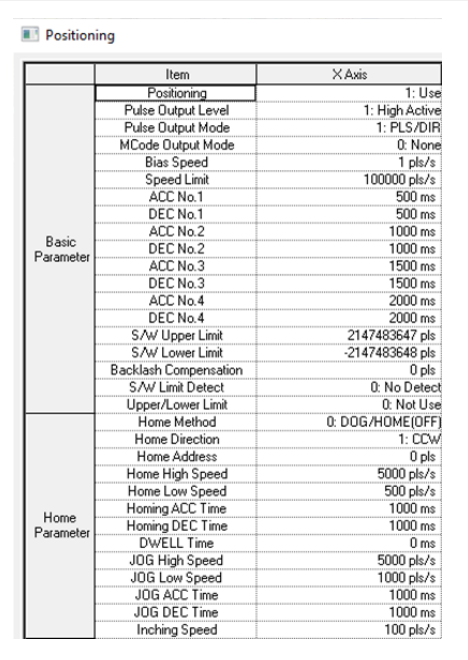
P3-08 -5زمان شتابگیری از صفر تا سرعت تنظیم شده و P3-09زمان کاهش سرعت تا توقف کامل است. در P3-13سرعت و در P3-17مدت زمان این سرعت را تنظیم میکنیم. در P3-14سرعت و در P3-18مدت زمان این سرعت را تنظیم میکنیم. در P3-15سرعت و در P3-19مدت زمان این سرعت را تنظیم میکنیم. در P3-16سرعت و در P3-20مدت زمان این سرعت را تنظیم میکنیم.
1-پارامتر CN-01را انتخاب کرده و کلید Setرا انتخاب نمایید و موتور طبق برن�
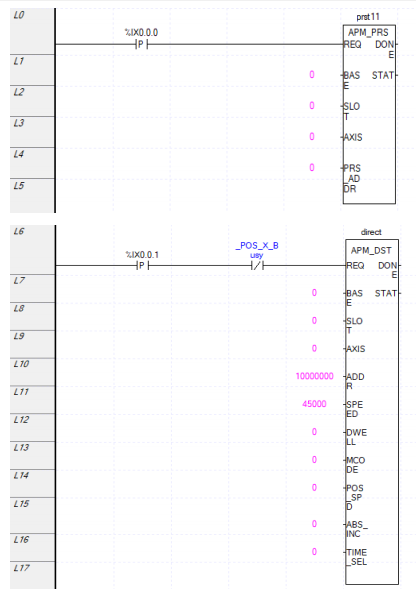
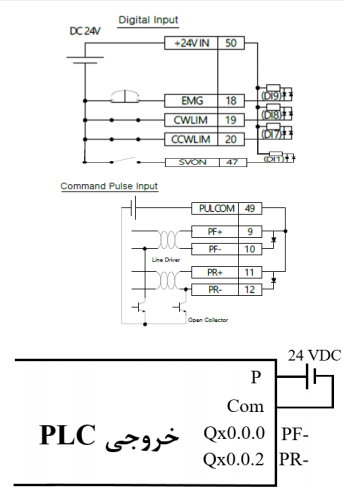
1-رسم مدار کنترلی
2-معرفی IDموتور: P0-00=1
3-معرفی نوع و تعداد پالس یا تعداد بیت انکدر: P0-01=0و P0-02=2048
4-مد عملکرد سروودرایو: P0-03=2که به معنای این است که سروو در حالت Positionکار میکند.
5- وظیفه پایههای ورودی را تنظیم کنید
P2-02=00A9 , P2-01=0X8765, P2-00=0X4321 .
6-منطق پایههای ورودی را تعریف کنید. P2-08= 11111 , P2-09= 10001
7-نوع عملکرد مد موقعیت ( ) P4-00= 2را در حالت Pulse& Directionتنظیم نمایید.
8-نوع اعمال پالس: جهت اعمال پالس پایه 4۹را به پایه +24ولت متصل کرده و خروجی plcاگر open collectorباشد را به پایه 10متصل میکنیم به پایه plc ، pرا به 24ولت متصل و پایه plc ، comرا به زمین متصل میکنیم.